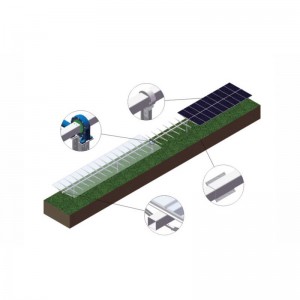
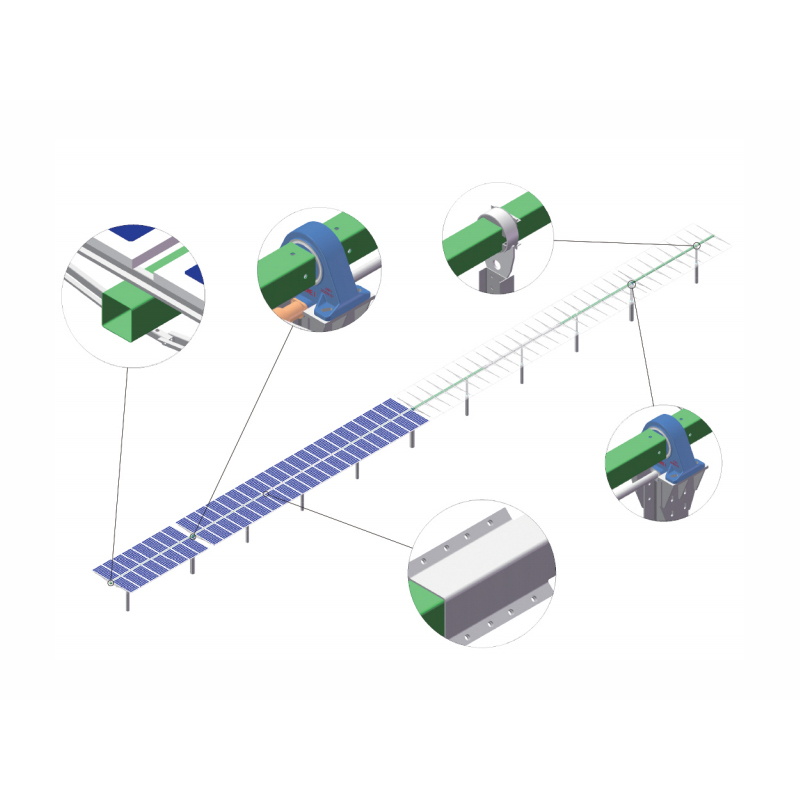
Horizon D + Силсилаи бисёрсоҳавӣ нуқтаи Drive Systems пайгирии офтобӣ
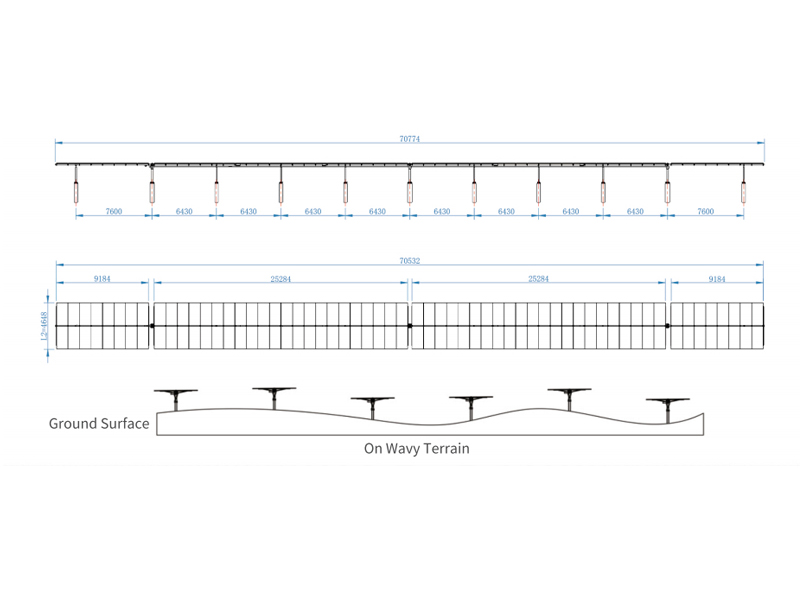
Мутобиқсозии баландМутобиқсозии фарқияти градиент ба релефи ноҳамвор дар самти NS то 15%
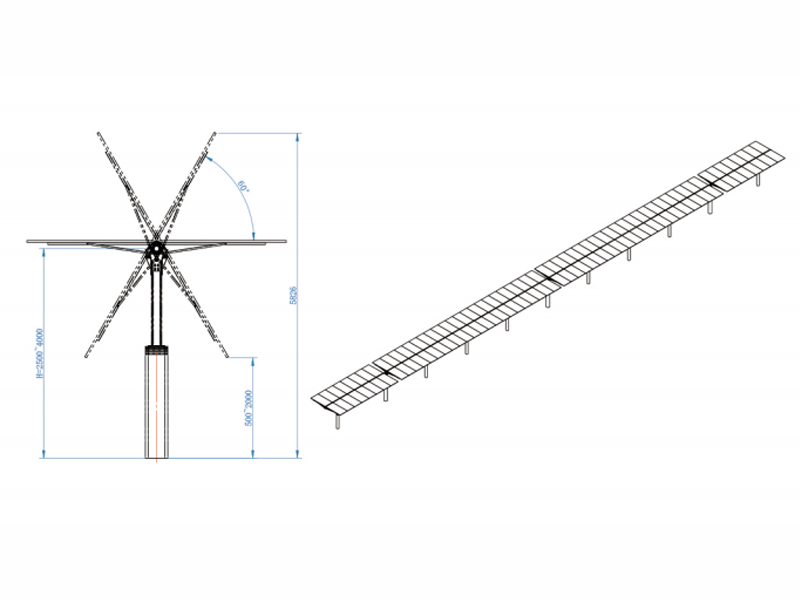
Устувории баландДиски бисёрҷониба муқовимати гардиши шамол ва суръати шамолро хеле зиёд мекунад
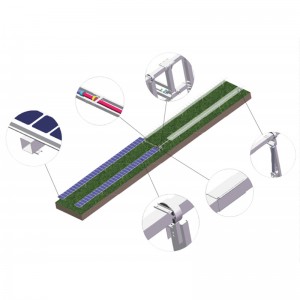
МутобиқатиБа модулҳои офтобии ҳуҷайраи 182/210мм мувофиқ аст
ДастрасӣДар байни трекерҳои мустақил бидуни монеа, барои сохтмон ва нигоҳдорӣ осон
ЭътимоднокӣСистемаи мустақили идоракунӣ барои назорат кардани амалиёт, дар сари вақт пайдо кардани нуқтаҳо ва кам кардани талафоти барқ ёрӣ мерасонад
Пайгирии интеллектуалӣКунҷи майлро мувофиқи маълумоти замин ва обу ҳаво оқилона ва саривақт танзим кунед, то тавлиди нерӯи барқро афзоиш диҳед
Тарҳрезии оқилонаУстуворӣ тавассути тарҳи истисноии сохторӣ ва санҷиши қатъии нақби шамол таъмин карда мешавад
| Технологияи пайгирӣ | Tracker як меҳвари уфуқӣ |
| Шиддати система | 1000В / 1500В |
| Диапазони пайгирӣ | 45° |
| Суръати шамоли корӣ | 18 м/с (Танзимшаванда) |
| Макс.Суръати шамол | 45 м/с (ASCE 7-10) |
| Модулҳо барои як Tracker | ≤120 Модулҳо (Фардозандашаванда) |
| Маводҳои асосӣ | Пӯлоди галвании гармии Q235B/Q355B / Zn-Al-Mg пӯлоди пӯшидашуда |
| Системаи ронандагӣ | Фаъолкунандаи хаттӣ / Drive Slewing |
| Навъи асос | PHC / Пули рехтагарӣ / Пӯлоди пӯлод |
| Системаи назорат | MCU |
| Ҳолати пайгирӣ | Назорати вақти даври пӯшида + GPS |
| Аниқии пайгирӣ | <2° |
| Муошират | бесим (ZigBee, LoRa);Сими (RS485) |
| Гирифтани нерӯ | Таъмини беруна / Таъмини сатр / Худшиносӣ |
| Истгоҳи худкор дар шабона | Бале |
| Истгоҳи худкор ҳангоми шамолҳои баланд | Бале |
| Бозгашти оптимизатсияшуда | Бале |
| Дараҷаи муҳофизат | IP65 |
| Ҳарорати корӣ | -30°C~65°C |
| Анемометр | Бале |
| Истеъмоли қувваи барқ | 0,3 кВт соат дар як рӯз |

Паёми худро дар ин ҷо нависед ва ба мо бифиристед